
|
|
Forum Index : Microcontroller and PC projects : GPS Speedometer Pico style
| Author | Message | ||||
lew247 Guru Joined: 23/12/2015 Location: United KingdomPosts: 1709 |
I have to thank Tom thwill for his massive help with the code for this project Also Geoff and Peter for the Pico port I wanted to make a small GPS speedometer for the dash of my car because I'm sure most of you know the speedometers are not calibrated They can be up to 10% in error of the speed, reading lower than what you're actually doing. I chose the Picomite because of it's small size, I had one here, Simplicity and it could do everything I wanted I used an 0.95" 96x64 SPI Full Colour SSD1331 OLED LCD Display Module but the second board I have coming from China will also be compatable with the 0.96" ST7735S 80x160 SPI Colour IPS TFT LCD Display Module I'll update the code to work with the new display once the new board has arrived from China For the GPS I chose the Matek Neo M9N-5883 GNSS + Compass Module from here https://www.unmannedtechshop.co.uk/product/matek-neo-m9n-5883-gnss-compass-module/ I chose that module because it's reliable with 10hz update speed and works with GPS, GALILEO, BEIDOU, and GLOSNASS satellites all at the same time this gives it greater accuracy. It was important to me that the unit be battery powered and need NO physical connection to the car and be small enough to sit on the dash in front of the steering wheel and be inobrusive. The unit is powered in my instance by a 6800mAh Lifepo4 battery pack, which has a Solar Charger attached and a 6v Solar panel The solar panel charges the battery even with a fully cloud covered sky in the UK and as the unit has enough battery power to power it for 90 hours with the cpu at full speed and the unit running continously then it should run forever (or many years) The code below wakes the display once the speed is at or above 3mps/kph I chose this value as sometimes when stopped the gps shows tiny speeds and I wanted to make certain the car was actually moving. Once the speed is 0 a timer starts If it has been 0 for greater than 1 minute then the display turns off, the cpu sleeps for 5 seconds, wakes for 200ms to check for movement, it there is any it checks the speed, if it's greater than 3 then the display comes on and the unit works as normal. If it's below 3 then the unit goes back to sleep to save battery power. I could save more power by slowing the CPU down, but I haven't done this yet. There was a lot of problems once the code was working where the display would not update in real time, it was really lagging and on investigation it was missing GPS(Valid) signals from the Pico once it woke up from sleep. The way this was fixed was the following Increase the baud rate to the Pico to 460800 and use the GPS config tool on the PC to change the sentences being received. I turned off every sentence other than the $GNRMC sentence which we actually need. This gave it 100% reliability but the update of the display was still not in real time I then used the same tool and changed the GPS update rate from 1hz to 10hz This cured all the problems, the display shows the slightest change in speed in real time and looks beautiful I think The display shows the battery voltage on start up and if the voltage drops below 3.2V then the K and M indicators are replaced by a B for battery. Once it has a valid satellite lock there is a green dot on the top right corner of the display indicating a valid GPS lock There is also an M and K indicator at the bottom right to indicate if the speed is MPH or KPH I have a switch wired to the Pico this lets you select MPH or KPH I used this because I sometimes drive to Ireland which uses KPH, if you only use one and not the other then the switch can be omitted The new board that is coming doesn't have the SD card you can see in the pictures below because it isn't needed I added a connector for a U1V10F5 battery to 5V buck convertor An U1V11F5 will also fit if the enable pin is missed, the other pins are identical They both boost the voltage to 5v output from any input from 0.5V The board has 3.7 Lipo4 battery only written on it but I put that on the board before I decided to use the new power up module This means the unit can be run on any battery from 0.5v up as long as the voltage isn't over 5V I think the program has enough comments on it to be self explanatory but if it doesn't just ask. Again many thanks to Tom for his invaluable help without which this code would not be possible Once i get the new display that is wider I'll update the code to show the changes and if I ever get the built in compass working then I'll get that incorporated into the display as well Has anyone in the UK got a 3D printer that they'd be willing to make a case for this? I'll be willing to pay for it Option Base 0 Option Default None Option Explicit On Cls Const VERSION$ = "0.25" ' **** Constants controlling hardware configuration and diagnostics *********** ' For testing purposes the code can run on the Colour Maximite 2. Const IS_CMM2% = Left$(Mm.Device$, 17) = "Colour Maximite 2" If Not IS_CMM2% And Mm.Device$ <> "PicoMite" Then Error "Unknown device" If IS_CMM2% Then Option Console Serial Const WIDTH% = 96 Const HEIGHT% = 64 Else Const WIDTH% = Mm.HRes Const HEIGHT% = Mm.VRes EndIf ' Set these to 1 to interface with real hardware or 0 to use the keyboard alternative: ' [A] - accelerate ' [Z] - decelerate ' [<] - decrease battery voltage ' [>] - increase battery voltage ' [Space] - toggle MPH/KPH ' [X] - toggle GPS valid/invalid Const REAL_GPS% = 1 Const REAL_BATTERY% = 1 Const REAL_MPH_TOGGLE% = 1 ' 1 to display diagnostics on the OLED, 0 for normal operation. Const DIAGNOSTICS_ON% = 0 ' If this is > 0 then generate debug output on this interval in milliseconds. Const DEBUG_INTERVAL% = 6000 ' 6 seconds. ' ***************************************************************************** ' If the speed is < 3 (MPH or KPH depending on toggle) for this duration then ' we transition from the DRIVING state to the STOPPING state. ' 10 seconds when REAL_GPS% = 0, otherwise 1 minute Const DELAY% = Choice(REAL_GPS%, 60, 10) * 1000 ' These are the states that the device can be in: Const STATE_STARTING% = 1 Const STATE_DRIVING% = 2 Const STATE_STOPPING% = 3 Const STATE_STOPPED% = 4 Const STATE_WAKING% = 5 Const STATE_RESTARTING% = 6 Const BATTERY_MIN! = 3.2 ' If the battery voltage falls below this the low ' battery warning will be shown. ' State variables: Dim gps_valid% ' 1 for valid, 0 for invalid. Dim mph_flag% ' 1 for MPH, 0 for KPH. Dim speed! ' Current speed in MPH or KPH as above. Dim battery! ' Battery voltage. Dim state% = STATE_STARTING% ' Current state, one of the STATE_XXXX% constants. ' When using the keyboard rather than the real hardware these are the variables ' that the keyboard manipulates. Dim test_gps_valid% = 1 ' Default to GPS signal valid. Dim test_mph_flag% = 1 ' Default to MPH. Dim test_speed! = 0 ' Note this is the speed in knots. Dim test_battery! = 5 ' Default to 5V. If REAL_GPS% Then SetPin GP0, GP1, COM1 Open "COM1:460800" As Gps ' Sets GPS pins EndIf If REAL_BATTERY% Then SetPin GP26, AIN ' This pin is always 1/2 battery voltage If REAL_MPH_TOGGLE% Then SetPin GP14, DIN, PULLUP ' MPH/KPH Select - 3.3V = MPH, 0V = KPH ' Enable keyboard interrupt unless we are using entirely real hardware. If Not REAL_GPS% Or Not REAL_BATTERY% Or Not REAL_MPH_TOGGLE% Then On Key on_key EndIf ' Generate debug output on the given interval. If DEBUG_INTERVAL% > 0 Then Print "PicoMite GPS Speedo v" VERSION$ print_debug_ex("POWER ON") SetTick DEBUG_INTERVAL%, print_debug EndIf Timer = 0 clear_display() Do read_inputs() update_state() update_display() If state% = STATE_STOPPED% And DIAGNOSTICS_ON% = 0 Then cpu_sleep(5) ' Sleep CPU for 5 seconds to save battery. EndIf ' Lewis you might consider adding an ELSE clause to the above, might make ' display marginally smoother and means you aren't constantly polling the GPS: ' Else ' Pause 100 ' EndIf Loop End Sub clear_display() If IS_CMM2% Then ' On the CMM2 we draw a box to simulate the OLED size. Box 0, 0, WIDTH%, HEIGHT%, 1, Rgb(Gray), Rgb(Black) Else Cls EndIf End Sub Sub read_inputs() ' Check if the GPS has a valid lock: gps_valid% = Choice(REAL_GPS%, Gps(Valid), test_gps_valid%) ' Read the M/K select pin: mph_flag% = Choice(REAL_MPH_TOGGLE%, Pin(GP14), test_mph_flag%) ' Read speed and adjust according to M/K select pin ' - note this may not actually be correct if gps_valid% = 0. speed! = Choice(REAL_GPS%, Gps(Speed), test_speed!) speed! = speed! * Choice(mph_flag%, 1.15077945, 1.852) ' Read battery voltage: battery! = Choice(REAL_BATTERY%, 2 * Pin(GP26), test_battery!) End Sub ' Decides what the unit is doing. Sub update_state() Local old_state% = state% Select Case state% Case STATE_STARTING% If Timer > 1000 Then state% = STATE_DRIVING% Case STATE_DRIVING% If speed! < 3 Then Timer = 0 state% = STATE_STOPPING% EndIf Case STATE_STOPPING% If speed! >= 3 Then state% = STATE_DRIVING% ElseIf Timer > DELAY% Then state% = STATE_STOPPED% EndIf Case STATE_STOPPED% If speed! >= 3 Then Timer = 0 state% = STATE_RESTARTING% Else Timer = 0 state% = STATE_WAKING% EndIf Case STATE_WAKING% If speed! >= 3 Then Timer = 0 state% = STATE_RESTARTING% Else If Timer > 200 Then state% = STATE_STOPPED% EndIf Case STATE_RESTARTING% If Timer > 2000 Then state% = STATE_DRIVING% Case Else Error "Unknown state" End Select ' Always log state changes. If state% <> old_state% Then print_debug() End Sub Sub update_display() If DIAGNOSTICS_ON% Then update_diagnostics_display() Exit Sub EndIf ' Static variables are like Dim'd (global) variables except they are local to the ' Sub or Function, they are only initialised the first time they are encountered. Static old_state% = -1 Static old_dvalue$ = "" Static old_dfont% = -1 Static old_dcolour% = -1 Static old_dindicator% = -1 Static old_dunits$= "" ' If we are still STOPPED/WAKING then don't update the display. If stopped_or_waking%(state%) And stopped_or_waking%(old_state%) Then Exit Sub Local dvalue$ = display_value$() Local dfont% = display_font%() Local dcolour% = display_colour%() Local dindicator% = display_indicator%() Local dunits$ = display_units$() ' If nothing has changed then don't update the display ' - a single line containing 5 AND statements is too long to work with, so do it this way. Local changed% Inc changed%, old_dvalue$ <> dvalue$ Inc changed%, old_dfont% <> dfont% Inc changed%, old_dcolour% <> dcolour% Inc changed%, old_dindicator% <> dindicator% Inc changed%, old_dunits$ <> dunits$ If Not changed% Then Exit Sub clear_display() If Not stopped_or_waking%(state%) Then Text WIDTH%/2, HEIGHT%/2, dvalue$, CM, dfont%, 1, dcolour% Circle 89, 5, 4, 1, 1, dindicator%, dindicator% Text 85, 62, dunits$, LB, 4, 1, Rgb(White) ' Uncomment to show version on STARTING/RESTARTING displays. If state% = STATE_STARTING% Or state% = STATE_RESTARTING% Then Text 2, 58, "v" + VERSION$, LB, 7 EndIf EndIf old_state% = state% old_dvalue$ = dvalue$ old_dfont% = dfont% old_dcolour% = dcolour% old_dindicator% = dindicator% old_dunits$= dunits$ End Sub Function stopped_or_waking%(st%) stopped_or_waking% = (st% = STATE_STOPPED% Or st% = STATE_WAKING%) End Function Function display_indicator%() display_indicator% = Choice(gps_valid%, Rgb(Green), Rgb(Black)) End Function Function display_value$() If state% = STATE_STARTING% Or state% = STATE_RESTARTING% Then display_value$ = Str$(battery!, 1, 1) + "V" ElseIf Not gps_valid% Then display_value$ = "--" Else display_value$ = Str$(speed!, 0, 0) EndIf End Function Function display_font%() display_font% = Choice(state% = STATE_STARTING% Or state% = STATE_RESTARTING%, 3, 6) End Function ' Returns colour to be used for speed display depending on current speed/state. Function display_colour%() If state% = STATE_STARTING% Or state% = STATE_RESTARTING% Then display_colour% = Rgb(White) ElseIf stopped_or_waking%(state%) Then ' We should never actually get to this point as we don't show the display ' at all under these conditions. display_colour% = Rgb(Black) ElseIf state% = STATE_STOPPING% Or Not gps_valid% Then display_colour% = Rgb(0, 128, 0) ElseIf speed! > Choice(mph_flag%, 71, 121) Then ' RED if Speed is 71Mph/121Kph or more display_colour% = Rgb(Red) ElseIf speed! > Choice(mph_flag%, 61, 101) Then ' ORANGE if Speed is 61Mph/101Kph or more display_colour% = Rgb(Orange) Else display_colour% = Rgb(Green) EndIf End Function Function display_units$() If battery! < BATTERY_MIN! Then display_units$ = "B" ' If battery < 3.2V then replace K/M with B. ElseIf speed! > 99 Then display_units$ = "" ' If speed > 99 then don't show K/M indicator. ElseIf mph_flag% Then display_units$ = "M" Else display_units$ = "K" EndIf End Function Sub update_diagnostics_display() Static count% = 1000 Inc count% If count% < 1000 Then Exit Sub clear_display() Text 2, 2, "GPS valid: " + Str$(gps_valid%), , 7 Text 2, 12, "MPH flag: " + Str$(mph_flag%), , 7 Text 2, 22, "Speed: " + Str$(speed!, 0, 3), , 7 Text 2, 32, "Battery: " + Str$(battery!, 0, 3), , 7 Text 2, 42, "State: " + Left$(state_as_string$(), 8), , 7 count% = 0 End Sub Sub cpu_sleep(duration_in_seconds%) print_debug_ex("*SLEEPING*") If REAL_GPS% Then Cpu Sleep duration_in_seconds% Else Pause duration_in_seconds% * 1000 EndIf End Sub Sub on_key() Select Case Inkey$ Case "a", "A" : test_speed! = Min(100, test_speed! + 0.5) Case "z", "Z" : test_speed! = Max(0, test_speed! - 0.5) Case ".", ">" : test_battery! = Min(5, test_battery! + 0.2) Case ",", "<" : test_battery! = Max(0, test_battery! - 0.2) Case "x", "X" : test_gps_valid% = Not test_gps_valid% Case " " : test_mph_flag% = Not test_mph_flag% End Select End Sub ' Note that because of how SETTICK interrupts are implemented in MMBasic it is ' possible if unlikely that this will occasionally be called partway through ' a call to read_inputs() resulting in inconsistent data, e.g. MPH flag set true, ' but Speed reported in KPH. Sub print_debug() print_debug_ex(state_as_string$()) End Sub Sub print_debug_ex(s$) If DEBUG_INTERVAL% <= 0 Then Exit Sub ' Note that without a clock installed Time$ = 00:00:00 will be when the unit started up. Print Time$ " - GPS valid:" gps_valid% ", MPH flag:" mph_flag%; Print ", Spd: " Str$(speed!, 0, 3) ", Bat: " Str$(battery!, 0, 3) ", State: " s$ End Sub Function state_as_string$() Select Case state% Case STATE_STARTING%: state_as_string$ = "STARTING" Case STATE_DRIVING%: state_as_string$ = "DRIVING" Case STATE_STOPPING%: state_as_string$ = "STOPPING" Case STATE_STOPPED%: state_as_string$ = "STOPPED" Case STATE_WAKING%: state_as_string$ = "WAKING" Case STATE_RESTARTING%: state_as_string$ = "RESTARTING" Case Else: state_as_string$ = "ERROR" End Select End Function This is the circuit for the updated board with support for both displays It does not have an SD card as it isn't needed for this project 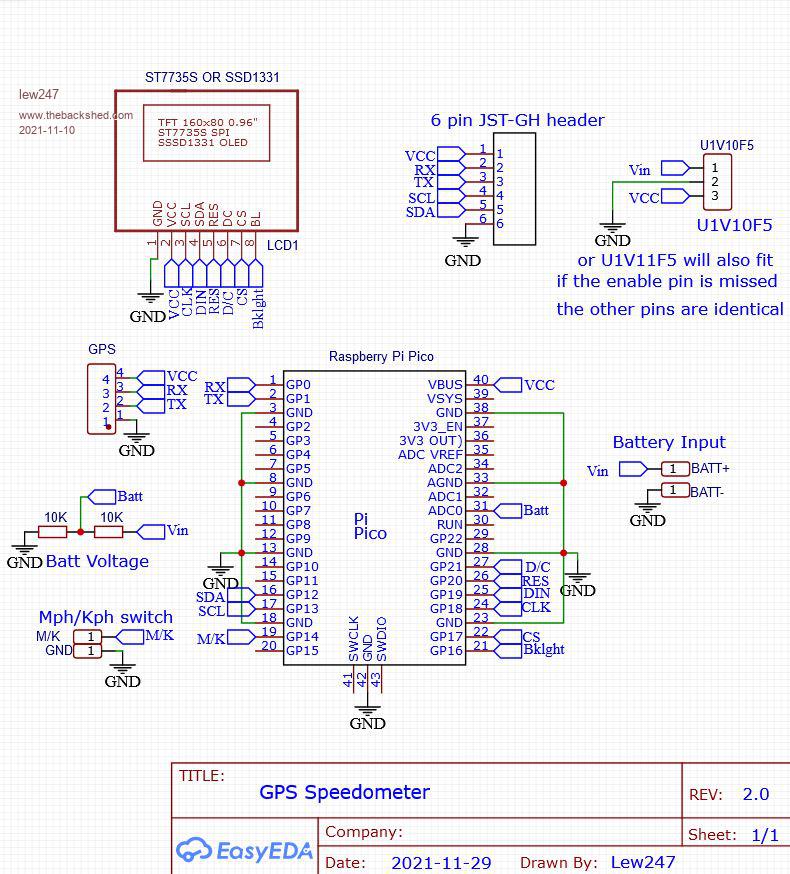 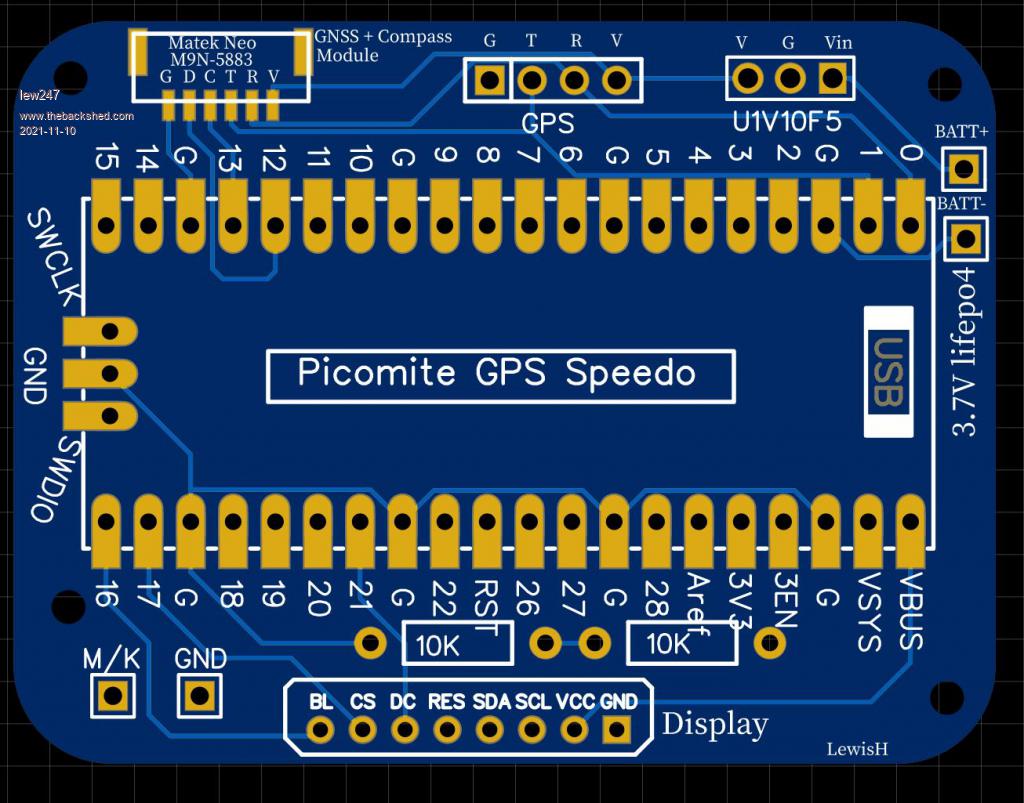 This looks really messy as it's sat on my lap and I don't have any kind of case to put it in yet. Power up display 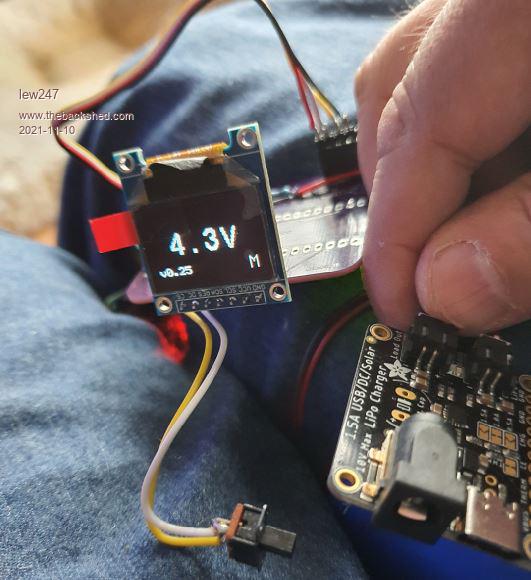 After Voltage reading but waiting for a valid GPS lock 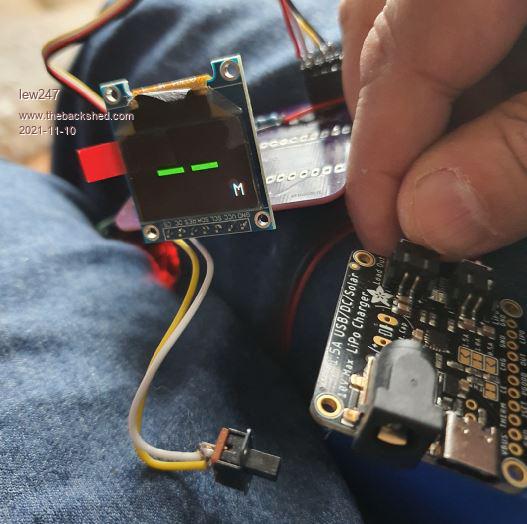 GPS lock with MPH 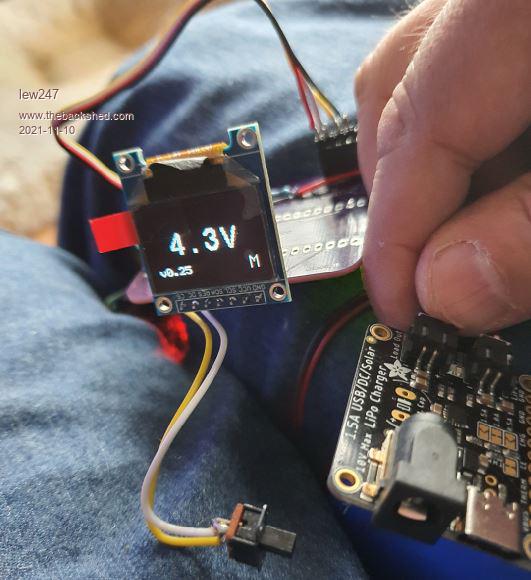 GPS lock with KPH 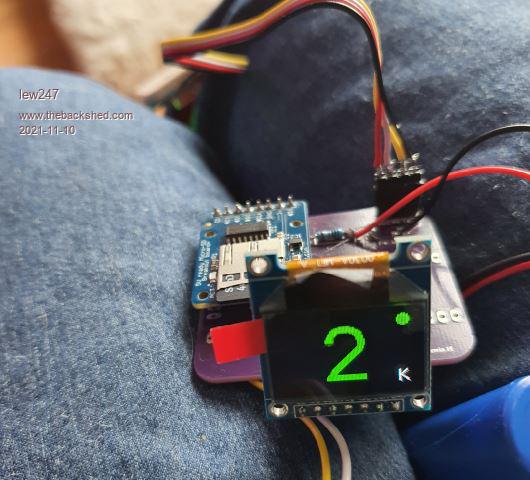 Battery pack 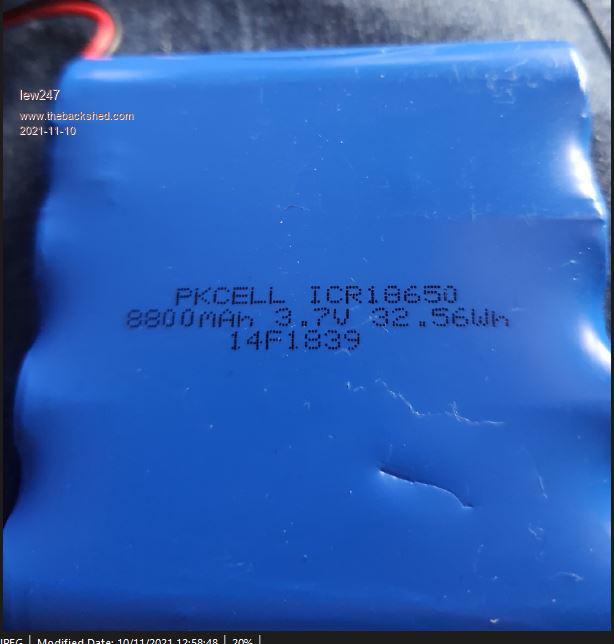 Solar charger  back of Solar charger 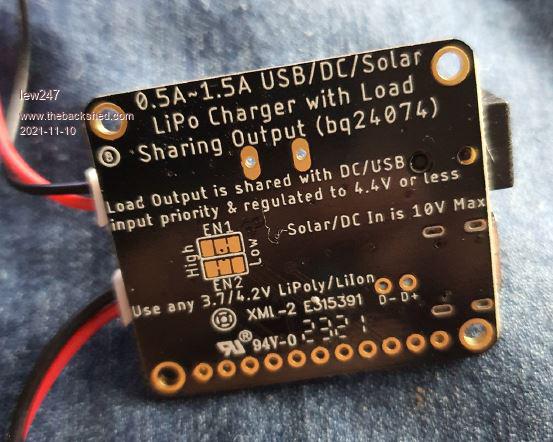 Edited 2021-11-10 23:26 by lew247 |
||||
| lizby Guru Joined: 17/05/2016 Location: United StatesPosts: 3782 |
Terrific project. Congratulations. I'll have to look into EasyEDA. PicoMite, Armmite F4, SensorKits, MMBasic Hardware, Games, etc. on FOTS |
||||
| Plasmamac Guru Joined: 31/01/2019 Location: GermanyPosts: 620 |
If you have a stl for your case i will print one for you, no problem Plasma |
||||
| lew247 Guru Joined: 23/12/2015 Location: United KingdomPosts: 1709 |
The following Youtube videos show the unit powering up once the car is moving and the 2nd one acceleration I forgot to say above that once the speed equals or gets above 61Mph/101Kph the display goes Orange When it gets to 71Mph/121Kph or above it goes red Startup Acceleration Unfortunately I know nothing about 3D printing so I'd have to send the completed unit to whoever was going to make a case. |
||||
| thwill Guru Joined: 16/09/2019 Location: United KingdomPosts: 4369 |
As I've said privately I know nothing about 3D printing, however as an old model maker I'd start by building a mockup out of corrugated cardboard, balsa wood or plasticard. EDIT: ... or cram it into the smallest project box you can and then as a display bezel have a fabricator make you a blank PCB with a cutout for the screen and another for the toggle switch - though I supposed their quality control might try try to throw it back at you as a WTF. Best wishes, Tom Edited 2021-11-11 01:26 by thwill MMBasic for Linux, Game*Mite, CMM2 Welcome Tape, Creaky old text adventures |
||||
| lew247 Guru Joined: 23/12/2015 Location: United KingdomPosts: 1709 |
Her who must be obeyed would would have a fit, it's her car  Edited 2021-11-11 01:46 by lew247 |
||||
| Mixtel90 Guru Joined: 05/10/2019 Location: United KingdomPosts: 8904 |
Plasticard can make nice cases (railway modellers use it all the time), as can foamboard, which is cheap, easily cut with a scalpel and steel rule and can be glued with a hot glue gun. Either would be fine for designing the final case to be printed. Nice project, lew. :) Mick Zilog Inside! nascom.info for Nascom & Gemini Preliminary MMBasic docs & my PCB designs |
||||
| lew247 Guru Joined: 23/12/2015 Location: United KingdomPosts: 1709 |
I'd never heard of the stuff before I agree it does look really intersting I'll get some and give it a try Thanks |
||||
| thwill Guru Joined: 16/09/2019 Location: United KingdomPosts: 4369 |
I'd forgotten about foam board it's really nice and easy to work with scalpel and steel rule as Mick suggests. One warning, if you paint it (a nice black aerosol finish) just make sure you use several light coats with a water based acrylic and not something with an organic solvent unless you want to dissolve all your good work  . .EDIT: I guess there are probably EU safety regulations about encasing LIPOs in enclosures made of cardboard and polystyrene - though I don't suppose we have to worry about them any more .Best wishes, Tom Edited 2021-11-11 04:57 by thwill MMBasic for Linux, Game*Mite, CMM2 Welcome Tape, Creaky old text adventures |
||||
| Mixtel90 Guru Joined: 05/10/2019 Location: United KingdomPosts: 8904 |
Would those be the regs that prevent us getting them through the post from ebay, Tom? :) Foam board: Good point on the paint! Water-based acrylic works well, not too bad even when applied with a brush. Interestingly, if you stick bits together face to face it's very strong and you can drill the stack and put coarse self tapping screws into it! Handy for mounting PCBs in a case. Edited 2021-11-11 05:26 by Mixtel90 Mick Zilog Inside! nascom.info for Nascom & Gemini Preliminary MMBasic docs & my PCB designs |
||||
| matherp Guru Joined: 11/12/2012 Location: United KingdomPosts: 11499 |
Plasticard is great stuff. Glue it with EMA plastic weld |
||||
palcal Guru Joined: 12/10/2011 Location: AustraliaPosts: 2039 |
I made a GPS speedo for my car, I just plug it into a USB charger in the cig. lighter.  Edited 2021-11-11 07:19 by palcal "It is better to be ignorant and ask a stupid question than to be plain Stupid and not ask at all" |
||||
| Volhout Guru Joined: 05/03/2018 Location: NetherlandsPosts: 5930 |
And her own speeding tickets.....  Edited 2021-11-11 17:46 by Volhout PicomiteVGA PETSCII ROBOTS |
||||
| thwill Guru Joined: 16/09/2019 Location: United KingdomPosts: 4369 |
I may have to be circumspect when it comes to field tests - "Honest officer it's a speedometer, not a bomb" :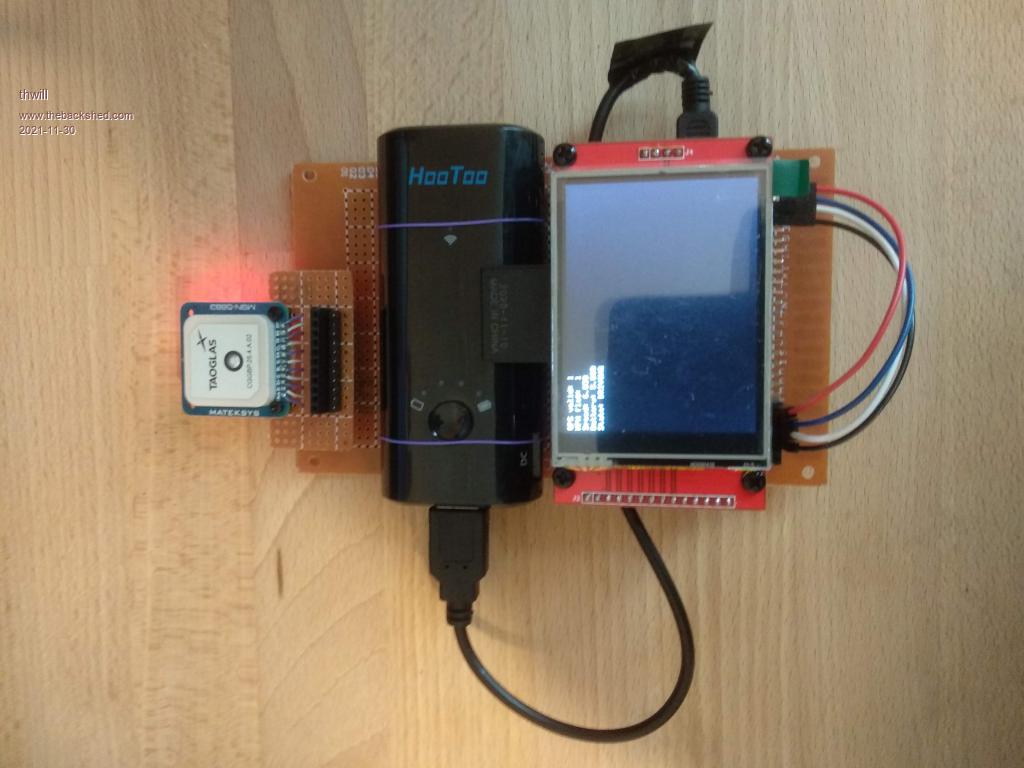 MMBasic for Linux, Game*Mite, CMM2 Welcome Tape, Creaky old text adventures |
||||
| The Back Shed's forum code is written, and hosted, in Australia. | © JAQ Software 2026 |
