
|
|
Forum Index : Microcontroller and PC projects : PicoMite driving robot
| Author | Message | ||||
| karlelch Guru Joined: 30/10/2014 Location: GermanyPosts: 328 |
A MMBasic controlled robot - for first release, see repository and video :) |
||||
| Volhout Guru Joined: 05/03/2018 Location: NetherlandsPosts: 5931 |
Nice !!! Read your repository text, inspiring... Volhout PicomiteVGA PETSCII ROBOTS |
||||
| Frank N. Furter Guru Joined: 28/05/2012 Location: GermanyPosts: 1102 |
Very cool!!!  Frank |
||||
| karlelch Guru Joined: 30/10/2014 Location: GermanyPosts: 328 |
Thanks! |
||||
| Mixtel90 Guru Joined: 05/10/2019 Location: United KingdomPosts: 8911 |
Love it! - And so cute and cuddly... ;) Did you consider using anything like IR scanning to detect what's ahead? Mick Zilog Inside! nascom.info for Nascom & Gemini Preliminary MMBasic docs & my PCB designs |
||||
| Calli Regular Member Joined: 20/10/2021 Location: GermanyPosts: 74 |
Big shoutout! Based on this design I was able after years of hesitating to build my second walking robot (first one was done in Lego, toothbrush ones not counted :)! 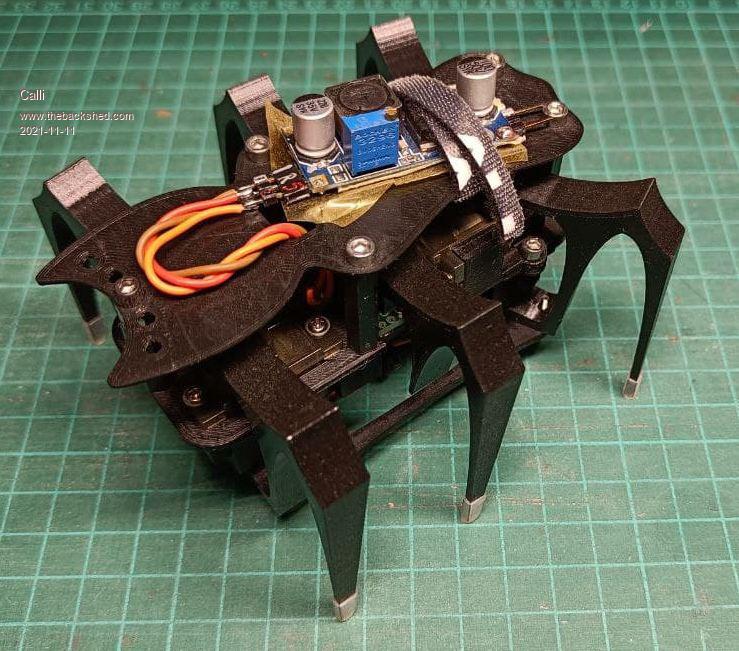 He just learned his first steps using PicoMite!(after erasing his brain from uPython) Thanks! Carsten PS: The Lego one: https://photos.app.goo.gl/9LvogUuUaRqXM6Jz8 I am still proud how good it works with just two motors. Edited 2021-11-11 22:58 by Calli |
||||
| Mixtel90 Guru Joined: 05/10/2019 Location: United KingdomPosts: 8911 |
That Lego one is lovely! Aawww.... :) Mick Zilog Inside! nascom.info for Nascom & Gemini Preliminary MMBasic docs & my PCB designs |
||||
| karlelch Guru Joined: 30/10/2014 Location: GermanyPosts: 328 |
Yes, the three little boards in the front are time-of-flight distance detectors from Pololu. They are quite nice because they provide a digital (pulsed) signal that encodes distance in the pulse length - easy to read in MMBasic. The sensors are angled (in the x-y plane) by 20 deg such that they cover the area in front of the robot. In addition, they are angled towards the ground, which allows detecting objects and cliffs (ie. the edge of the table) with the same sensors: Distances within a range of ~5-10 cms are interpreted as safe, shorter distances mean object, larger distances mean cliff. The readout of the sensors is shown as bars on the display; in addition, the RGB LED is green for "no danger", yellow for object detected, and red for cliff. |
||||
| karlelch Guru Joined: 30/10/2014 Location: GermanyPosts: 328 |
Brainwashed ;-) |
||||
| The Back Shed's forum code is written, and hosted, in Australia. | © JAQ Software 2026 |
